BALANCE
 The goal of BALANCE is to realize a robotic exoskeleton that improves the balance performance of humans while standing and walking. Such a robot could help in situations where keeping balance is difficult, such as in specific work conditions, or help people that have difficulty maintaining their balance, such as people with neurological injury, for example during rehabilitation sessions.
The goal of BALANCE is to realize a robotic exoskeleton that improves the balance performance of humans while standing and walking. Such a robot could help in situations where keeping balance is difficult, such as in specific work conditions, or help people that have difficulty maintaining their balance, such as people with neurological injury, for example during rehabilitation sessions.
The exoskeleton will be human-cooperative. This means that the exoskeleton will support the user, but not fully take over the control when this is not needed. Depending on the application it can either assist only in difficult conditions or in case of erroneous behavior of the user, or it can fully take over postural balance control of the human user. Supported tasks are functional standing and walking, in a clinical, real all-day life or work environment.
Results and publications can be viewed by following this link.
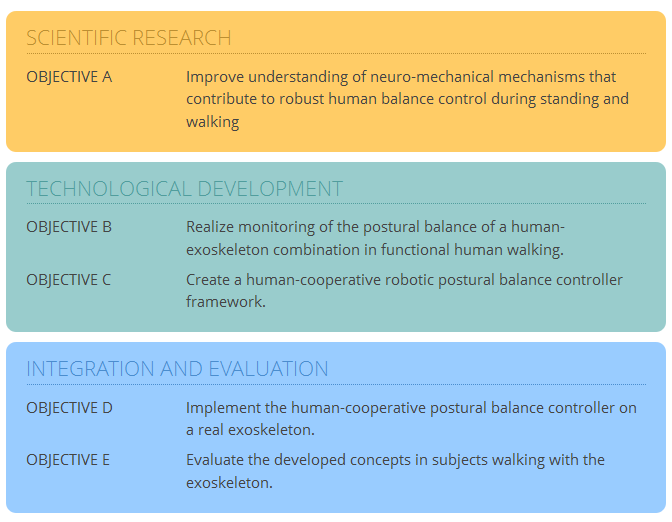
Objectives
Partners

Tecnalia Research & Innovation (Spain)
Imperial College London (UK)
CEA-LIST (France)
University of Twente (Netherlands)
ETH Zurich (Switzerland)
Xsens (Netherlands)
University Rehabilitation Institute (Republic of Slovenia)
Involved People:
Maziar Ahmad Sharbafi,
Guoping Zhao,
Dario Tokur,
Moritz Maus, André Seyfarth