

Previous News
Human Lower Limb Joint Biomechanics in Daily Life Activities: A Literature Based Requirement Analysis for Anthropomorphic Robot Design
Human lower limb biomechanics of daily activities were investigated in one of our latest studies by Martin Grimmer, Ahmed Elshamanhory and Philipp Beckerle. The work was recently published in Frontiers in Robotics and AI. The analyzed data is available as supplementary material Matlab file.

Abstract: Daily human activity is characterized by a broad variety of movement tasks. This work summarizes the sagittal hip, knee, and ankle joint biomechanics for a broad range of daily movements, based on previously published literature, to identify requirements for robotic design. Maximum joint power, moment, angular velocity, and angular acceleration, as well as the movement-related range of motion and the mean absolute power were extracted, compared, and analyzed for essential and sportive movement tasks. We found that the full human range of motion is required to mimic human like performance and versatility. In general, sportive movements were found to exhibit the highest joint requirements in angular velocity, angular acceleration, moment, power, and mean absolute power. However, at the hip, essential movements, such as recovery, had comparable or even higher requirements. Further, we found that the moment and power demands were generally higher in stance, while the angular velocity and angular acceleration were mostly higher or equal in swing compared to stance for locomotion tasks. The extracted requirements provide a novel comprehensive overview that can help with the dimensioning of actuators enabling tailored assistance or rehabilitation for wearable lower limb robots, and to achieve essential, sportive or augmented performances that exceed natural human capabilities with humanoid robots.
For further projects and publications of M. Grimmer please check: ResearchGate, Google Scholar, ORCID or LOOP
Review of balance recovery in response to external perturbations during daily activities
Balance related responses to perturbations were investigated in one of our latest studies by Dr. Dario Tokur, Dr. Martin Grimmer and Prof. Andre Seyfarth. The work was recently published in Human Movement Science.

Abstract: Balance is an essential capability to ensure upright standing and locomotion. Various external perturbations challenge our balance in daily life and increase the risk for falling and associated injury. Researchers try to identify the human mechanisms to maintain balance by intentional perturbations. The objectives of this work were to point out which areas of perturbation based research are well covered and not well covered and to extract which coping mechanisms humans use to respond to external perturbations. A literature review was performed to analyze mechanisms in response to external perturbations such as pushes to the body or ground level changes during standing, walking, running and hopping. To get a well-structured overview on the two dimensions, the perturbation type and the task, the Perturbation Matrix (PMA) was designed. We found that multiple studies exist for the tasks walking and standing, while hopping and running are covered less. However, all tasks still offer opportunities for both in-depth and fundamental research. Regarding the recovery mechanisms we found that humans can recover from various types of perturbations with versatile mechanisms using combinations of trunk, as well as upper and lower limb movements. The recovery movements will adapt depending on the perturbation intensity, direction and timing. Changes in joint kinetics, joint kinematics and muscle activity were identified on the joint level and leg stiffness and leg length on the global leg level. We believe that the insights from the extracted mechanisms may be applied to the hardware and control of robotic limbs or lower limb exoskeletons to improve the balance and robustness during standing or locomotion.
For further projects and publications of M. Grimmer please check: ResearchGate, Google Scholar, ORCID or LOOP
Biomechanical effects of passive hip springs during walking
The effects of passive springs at the hip were investigated in a collaboration project of Florian Haufe, Peter Wolf and Robert Riener from the Sensory-Motor Systems Lab from ETH Zurich and Martin Grimmer from the Lauflabor. The work was recently published in the Journal of Biomechanics.

Abstract:
Passive spring-like structures can store and return energy during cyclic movements and thereby reduce the energetic cost of locomotion. That makes them important components of the human body and wearable assistive devices alike. This study investigates how springs placed anteriorly across the hip joint affect leg joint angles and powers, and leg muscle activities during level walking at 0.5 to 2.1 m/s.
We hypothesized that the anterior hip springs (I) load hip extension, (II) support hip flexion and (III) affect ankle muscle activity and dynamics during walking. Effects at the ankle were expected because hip and ankle redistribute segmental power in concert to achieve forward progression.
We observed that the participants’ contribution to hip power did not increase during hip extension as the spring stored energy. Simultaneously, the activities of plantarflexor muscles that modulate energy storage in the Achilles tendon were reduced by 28% (gastrocnemius medialis) and 9% (soleus). As the spring returned energy with the onset of hip flexion, the participants’ contribution to hip power was reduced by as much as 23%. Soleus activity before push-off increased by up to 9%.
Instead of loading hip extension, anterior hip springs seem to store and return parts of the energy normally exchanged with the Achilles tendon. Thereby, the springs support hip flexion but may reduce elastic energy storage in and hence recoil from the Achilles tendon. This interaction should be considered during the design and simulation of wearable assistive devices as it might – depending on user characteristics – enhance or diminish their overall functionality.
For further projects and publications of M. Grimmer please check: ResearchGate, Google Scholar, ORCID or LOOP
Biarticular muscles are most responsive to upper-body pitch perturbations in human standing
Our latest publication features the results of Christian's lab visit in the Delft Biorobotics Lab. The study investigates important muscle groups to maintain an upright body posture when being perturbed. For this purpose, he used a novel type of balance perturbation, a control moment gyroscope (see Figure) that exerts a torque on the subject's upper body. Find more information in the published paper: Link to Scientific Reports.
![[[https://www.nature.com/articles/s41598-019-50995-3|Link to Scientific Reports]]](/lib/exe/fetch.php?w=600&tok=86af0a&media=gyro.jpg "[[https://www.nature.com/articles/s41598-019-50995-3|Link to Scientific Reports]]")
Abstract:
Balancing the upper body is pivotal for upright and efficient gait. While models have identified potentially useful characteristics of biarticular thigh muscles for postural control of the upper body, experimental evidence for their specific role is lacking. Based on theoretical findings, we hypothesised that biarticular muscle activity would increase strongly in response to upper-body perturbations. To test this hypothesis, we used a novel Angular Momentum Perturbator (AMP) that, in contrast to existing methods, perturbs the upper-body posture with only minimal effect on Centre of Mass (CoM) excursions. The impulse-like AMP torques applied to the trunk of subjects resulted in upper-body pitch deflections of up to 17° with only small CoM excursions below 2 cm. Biarticular thigh muscles (biceps femoris long head and rectus femoris) showed the strongest increase in muscular activity (mid- and long-latency reflexes, starting 100 ms after perturbation onset) of all eight measured leg muscles which highlights the importance of biarticular muscles for restoring upper-body balance. These insights could be used for improving technological aids like rehabilitation or assistive devices, and the effectiveness of physical training for fall prevention e.g. for elderly people.
 We are very sad that our highly appreciated colleague and friend Prof. Dr. Karl Kalveram passed away.
We are very sad that our highly appreciated colleague and friend Prof. Dr. Karl Kalveram passed away.
Bio-Inspired Balance Control Assistance Can Reduce Metabolic Energy Consumption in Human Walking
A new control method for exoskeleton, which is inspired by a human posture control concept, is proposed and tested in this research. It can not only facilitate the human gait, but also reduce the exoskeleton power consumption. This study is presented in a recently published paper by Zhao et al. in IEEE Transactions on Neural Systems and Rehabilitation Engineering.

Abstract:
The amount of research on developing exoskeletons for human gait assistance has been growing in the recent years. However, the control design of exoskeletons for assisting human walking remains unclear. This paper presents a novel bio-inspired reflex-based control for assisting human walking. In this approach, the leg force is used as a feedback signal to adjust hip compliance. The effects of modulating hip compliance on walking gait is investigated through joint kinematics, leg muscle activations and overall metabolic costs for eight healthy young subjects. Reduction in the average metabolic cost and muscle activation are achieved with fixed hip compliance. Compared to the fixed hip compliance, improved assistance as reflected in more consistent reduction in muscle activities and more natural kinematic behaviour are obtained using the leg force feedback. Furthermore, smoother motor torques and less peak power are two additional advantages obtained by compliance modulation. The results show that the proposed control method which is inspired by human posture control can not only facilitate the human gait, but also reduce the exoskeleton power consumption. This demonstrates that the proposed bio-inspired controller allows a synergistic interaction between human and robot.
For further publications of the author please check: ResearchGate,
ORCID or LOOP
Parallel compliance design for increasing robustness and efficiency in legged locomotion-proof of concept
A new concept for simultanous design and control of parallel compliance is introduced in this research. The analytical design approach is based on hybrid zero dynamics control method and the goal is increasing robustness in locomotion. This study is presented in a recently published paper by Sharbafi et al., in by Grimmer et al. in IEEE Transactions on Mechatronics.


Abstract:
Benefiting from serial compliance in series elastic actuators can be considered as a breakthrough in robotics. Recently, applying the parallel compliance in robot designs is growing based on its advantages such as reduction in consumed torques. In this paper, we aim at employing parallel compliance to increase walking robustness of bipedal robots against model uncertainties. Utilizing passive compliant elements instead of adapting the controller in order to cope with uncertainties makes the system more efficient and less sensitive to measurement issues such as delays and noise. We introduce a methodology for designing both parallel compliance and controller using hybrid zero dynamics concept. This study includes simulation results representing the design approach and preliminary experiments on parallel compliance effects on efficiency of a robot joint position control. The simulations comprise a compass gait (2-link) model and a 5-link model (see the figures). The ground slope and robot segment lengths are considered as uncertain parameters in the first and second models, respectively. The control target is met by the insertion of compliant structures parallel to the actuators. In order to employ the proposed method on a real robot, we suggest using pneumatic air muscles as parallel compliant elements. Pilot experiments on the knee joint of BioBiped3 robot support the feasibility of suggested method.
For further publications of the author please check: ResearchGate, Google Scholar, ORCID or LOOP
Stance and Swing Detection Based on the Angular Velocity of Lower Limb Segments During Walking
A new concept for stance and swing detection based on lower limb segments is introduced in a recently published paper by Grimmer et al. in Frontiers in Neurorobotics Stance and Swing Detection Based on the Angular Velocity of Lower Limb Segments During Walking.


Abstract:
Lower limb exoskeletons require the correct support magnitude and timing to achieve user assistance. This study evaluated whether the sign of the angular velocity of lower limb segments can be used to determine the timing of the stance and the swing phase during walking. We assumed that stance phase is characterized by a positive, swing phase by a negative angular velocity. Thus, the transitions can be used to also identify heel-strike and toe-off. Thirteen subjects without gait impairments walked on a treadmill at speeds between 0.5 and 2.1 m/s on level ground and inclinations between −10 and +10°. Kinematic and kinetic data was measured simultaneously from an optical motion capture system, force plates, and five inertial measurement units (IMUs). These recordings were used to compute the angular velocities of four lower limb segments: two biological (thigh, shank) and two virtual that were geometrical projections of the biological segments (virtual leg, virtual extended leg). We analyzed the reliability (two sign changes of the angular velocity per stride) and the accuracy (offset in timing between sign change and ground reaction force based timing) of the virtual and biological segments for detecting the gait phases stance and swing. The motion capture data revealed that virtual limb segments seem superior to the biological limb segments in the reliability of stance and swing detection. However, increased signal noise when using the IMUs required additional rule sets for reliable stance and swing detection. With IMUs, the biological shank segment had the least variability in accuracy. The IMU-based heel-strike events of the shank and both virtual segment were slightly early (3.3–4.8% of the gait cycle) compared to the ground reaction force-based timing. Toe-off event timing showed more variability (9.0% too early to 7.3% too late) between the segments and changed with walking speed. The results show that the detection of the heel-strike, and thus stance phase, based on IMU angular velocity is possible for different segments when additional rule sets are included. Further work is required to improve the timing accuracy for the toe-off detection (swing).
For further publications of the author please check: ResearchGate, Google Scholar, ORCID or LOOP
From template to anchors: leg force can tune muscle activation

A new level of modelling evolution is introduced with replacing springs by muscle models in our recently published paper in the Royal Society Open Science journal titled From template to anchors: transfer of virtual pendulum posture control balance template to adaptive neuromuscular gait model increases walking stability.
Abstract:
Biomechanical models with different levels of complexity are of advantage to understand the underlying principles of legged locomotion. Following a minimalistic approach of gradually increasing model complexity based on Template & Anchor concept, in this paper, a spring-loaded inverted pendulum-based walking model is extended by a rigid trunk, hip muscles and reflex control, called nmF (neuromuscular force modulated compliant hip) model. Our control strategy includes leg force feedback to activate hip muscles (originated from the FMCH approach), and a discrete linear quadratic regulator for adapting muscle reflexes. The nmF model demonstrates human-like walking kinematic and dynamic features such as the virtual pendulum (VP) concept, inherited from the FMCH model. Moreover, the robustness against postural perturbations is two times higher in the nmF model compared to the FMCH model and even further increased in the adaptive nmF model. This is due to the intrinsic muscle dynamics and the tuning of the reflex gains. With this, we demonstrate, for the first time, the evolution of mechanical template models (e.g. VP concept) to a more physiological level (nmF model). This shows that the template model can be successfully used to design and control robust locomotor systems with more realistic system behaviours.
Keywords: Template & Anchor, leg force feedback, posture control, reflex control, sensor-motor map.
Concerted control concept in locomotion


A new concept termed concerted control is introduced in our recently published paper in the IEEE Transactions on Medical Robotics and Bionics journal titled Concerted control of stance and balance locomotor subfunctions -Leg force as a conductor.
Abstract:
In human locomotion, the complex structure of the human body is controlled such that conceptual models (e.g., the spring-loaded-inverted-pendulum model) can describe the significant features. This suggests that the interplay of the complex control and musculoskeletal systems projects into a low-dimensional space to perform different movements. Such simplification can involve splitting the task into different modular control subproblems (locomotor subfunctions) that can be solved individually. Here, we asked how two locomotor subfunctions, namely stance, and balance, could be coordinated to generate repeatable and robust motor commands. We developed a simple neuromechanical hopping model, based on decoupling axial and perpendicular leg forces. For this, bouncing behaviors and trunk posture control can be addressed by a knee extensor muscle and biarticular thigh muscles, respectively. We suggest utilizing the leg force feedback as interplay among environment, body mechanics, and sensory control to synchronize the decoupled subfunctions. We evaluated this approach in push recovery, attenuating ground drop perturbations and by investigating its sensitivity to the reflex gain as the control parameter. Leg force feedback can improve the robustness of hopping by generating rhythmic hopping patterns. Such a parsimony model-based control concept could simplify controlling assistive devices, such as exoskeletons and prostheses.
Keywords: Locomotor subfunction, positive force feedback, reflex control, sensor-motor map.
Can exoskeletons be helpful to improve daily mobility?

A recently in the Journal of NeuroEngineering and Rehabilitation published article with the title Mobility related physical and functional losses due to aging and disease - a motivation for lower limb exoskeletonstargets adresses the topic.
If you want to know more about it have a look at the following abstract or visit JNER for the whole publication.
Abstract:
Background: Physical and functional losses due to aging and diseases decrease human mobility, independence, and quality of life. This study is aimed at summarizing and quantifying these losses in order to motivate solutions to overcome them with a special focus on the possibilities by using lower limb exoskeletons.
Methods: A narrative literature review was performed to determine a broad range of mobility-related physical and functional measures that are affected by aging and selected cardiovascular, respiratory, musculoskeletal, and neurological diseases.
Results: The study identified that decreases in limb maximum muscle force and power (33% and 49%, respectively, 25–75 yrs) and in maximum oxygen consumption (40%, 20–80 yrs) occur for older adults compared to young adults. Reaction times more than double (18–90 yrs) and losses in the visual, vestibular, and somatosensory systems were reported. Additionally, we found decreases in steps per day (75%, 60–85 yrs), maximum walking speed (24%, 25–75 yrs), and maximum six-minute and self-selected walking speed (38% and 21%, respectively, 20–85 yrs), while we found increases in the number of falls relative to the number of steps per day (800%), injuries due to falls (472%, 30–90 yrs) and deaths caused by fall (4000%, 65–90 yrs). Measures were identified to be worse for individuals with impaired mobility. Additional detrimental effects identified for them were the loss of upright standing and locomotion, freezing in movement, joint stress, pain, and changes in gait patterns.
Discussion: This review shows that aging and chronic conditions result in wide-ranging losses in physical and sensory capabilities. While the impact of these losses are relatively modest for level walking, they become limiting during more demanding tasks such as walking on inclined ground, climbing stairs, or walking over longer periods, and especially when coupled with a debilitating disease. As the physical and functional parameters are closely related, we believe that lost functional capabilities can be indirectly improved by training of the physical capabilities. However, assistive devices can supplement the lost functional capabilities directly by compensating for losses with propulsion, weight support, and balance support.
Conclusions: Exoskeletons are a new generation of assistive devices that have the potential to provide both, training capabilities and functional compensation, to enhance human mobility.
Click JNER for the whole article.
For further publications of the autohr please check: ResearchGate, Google Scholar, ORCID or LOOP
Haptic ankle manipulator – Design & Development

In the current age, the interaction of robotic devices with humans, becomes increasingly important, e.g. for the development of active prosthesis. In order to improve the performance and development of these devices, mechanisms of human and its behaviour have to be better understood. However, a comprehensive understanding of these areas is yet not available. One approach in research, that aims to fill in this gap of knowledge employs simulation models to describe human behaviour.
These simulations are developed by analysing biomechanical data, the development of kinematic models and by observing of the interaction forces acting on the human body. Acquired insights, gained by data analysis, can be used for a better understanding of neuromuscular mechanisms in the human body or e.g. for an improvement of simulation models and therefore advance the development and performance of robotic devices.
One approach in research for investigating biomechanical response of humans involves the use of haptic systems…
Click here for more information.
Sensor-Motor Maps for Decoding Reflex Contribution

We present the concept of Sensor-Motor Maps for investigating the blending and processing of sensory pathways. In these maps, the resulting motor output (e.g. motion stability or performance, energy efficiency etc.) can be used to evaluate the functional contribution of blended sensory signals (Fig. 1).
To explore this methodology we chose a simple hopping model from Geyer et al. (2003) and tested the robustness of the Sensor-Motor Maps by changing the body morphology of the system as well as properties of the environment. We found compact and consistent map topologies for all conditions, suggesting the that the Sensor-Motor Maps can be a valuable tool to investigate sensory integration.
The related work is available here: Open Access.
Template Model Inspired Leg Force Feedback Based Control Can Assist Human Walking

We present a novel control approach for assistive lower-extremity exoskeletons. In particular, we implement a virtual pivot point (VPP) template model inspired leg force feedback based controller on a lower-extremity powered exoskeleton (LOPES II) and demonstrate that it can effectively assist humans during walking. It has been shown that the VPP template model is capable of stabilizing the trunk and reproduce a human-like hip torque during the stance phase of walking. With leg force and joint angle feedback inspired by the VPP template model, our controller provides hip and knee torque assistance during the stance phase. A pilot experiment was conducted with four healthy subjects. Joint kinematics, leg muscle electromyography (EMG), and metabolic cost were measured during walking with and without assistance. Results show that, for 0.6m/s walking, our controller can reduce leg muscle activations, especially for the medial gastrocnemius (about 16.0%), while hip and knee joint kinematics remain similar to the condition without the controller. Besides, the controller also reduces 10% of the net metabolic cost during walking. It demonstrates walking assistance benefits of the VPP template model for the first time. The support of human walking is achieved by a force feedback of leg force applied to the control of hip and knee joints. It can help us to provide a framework for investigating walking assistance control in the future.
This work will be presented in the ICORR2017 conference by Guoping Zhao.
A new biarticular actuator design facilitates control of leg function in BioBiped3
Bioinspired legged locomotion comprises different aspects, such as (i) benefiting from reduced complexity control approaches as observed in humans/animals, (ii) combining embodiment with the controllers and (iii) reflecting neural control mechanisms. One of the most important lessons learned from nature is the significant role of compliance in simplifying control, enhancing energy efficiency and robustness against perturbations for legged locomotion. In this research, we investigate how body morphology in combination with actuator design may facilitate motor control of leg function. Inspired by the human leg muscular system, we show that biarticular muscles have a key role in balancing the upper body, joint coordination and swing leg control. Appropriate adjustment of biarticular spring rest length and stiffness can simplify the control and also reduce energy consumption. In order to test these findings, the BioBiped3 robot was developed as a new version of BioBiped series of biologically inspired, compliant musculoskeletal robots (Fig. 1). In this robot, three-segmented legs actuated by mono- and biarticular series elastic actuators mimic the nine major human leg muscle groups. With the new biarticular actuators in BioBiped3, novel simplified control concepts for postural balance and for joint coordination in rebounding movements (drop jumps) were demonstrated and approved (Fig. 2).
Read the complete paper here.
 |  |
Roboterwelt.de
Our group and research is one of the newest topics in the news-blog www.robotoerwelt.de.

Hannover Messe 2015


The PAKO powered orthoprosthesis developed at TU Darmstadt was one of the exhibits of TU9 on the Hannover Messe 2015. The TU9 is the alliance of leading Institutes of Technology in Germany. Next to the medical research device PAKO, an electric vehicle from the Deliver project (RWTH Aachen) and an IT security solution from KIT were on exibition.
A video of the TU9 @ Hannover Messe can be seen here here
Phd thesis published

Now available for download: TUPRINTS
Human upright locomotion emerged about 6 million years ago. It is achieved by a complex interaction of the biological infrastructure and the neural control. Bones, muscles, tendons, central nervous commands and reflex mechanisms interact to provide robust and efficient bipedal movement patterns like walking or running. Next to these locomotion tasks humans can also perform complex movements like climbing, dancing or jumping. Diseases or traumatic events may cause the loss of parts of the biological infrastructure or the ability to control the lower limbs. Thus an identification of the required framework helps to improve on the artificial lower limb design and the control for bipedal robots, exoskeletons, orthoses or prostheses. A first artificial leg design was reported about 5000 years ago. After losing one leg in a battle an iron leg was fitted to Queen Vishpla to get her back on the battlefield. Since this time major changes in the structure, the material and the functionality led to improved prosthetic restoration of physically disabled. The characteristics of the biological leg structure are imitated by technical components. Using carbon fiber for the design of prosthetic feet made it possible to benefit from the elastic recoil like in the Achilles tendon in stance phase. Dampers in prosthetic knee joints are able to mimic eccentric muscle work during the gait cycle. Clutch-like mechanisms are used to lock the knee during stance. Such a function is comparable to isometric muscle work. Semiactive knee joints allow changes in damping ratio to adapt the mechanical joint properties to the requirements. Using integrated force or inertial sensors, movement tasks can be identified. An adaptation of damping to different walking speeds and conditions, such as walking inclines, declines, or climbing stairs is possible. All these developments permitted that amputees gait got closer to the natural human gait pattern. However, until the end of the 20th century prostheses were not able to reproduce concentric muscle work. External positive energy is required to compensate for energy losses during locomotion. For climbing stairs or walking inclines not only the ankle, but also the knee joint contributes net positive work to lift the body center of mass. To achieve desired joint motion, a power source like a motor would be required that can inject energy to mimic the concentric function of the muscle fascicles. The thesis comprises an analysis of joint requirements, it evaluates the current prosthetic design approaches and develops models on artificial muscles to mimic lower limb biomechanics in walking and running. The developed models are biologically inspired, while motors represent the function of muscle fibers and springs represent the function of the tendons. These systems are optimized for criteria like minimum joint peak power or minimum required energy for the power source (motor). Results demonstrate that elastic elements can highly decrease the actuator requirements. The springs are able to store energy in one phase of the gait cycle and to release it later when high peak power is required. Without the elastic assistance the reproduction of human joint behavior is hardly possible using current motor technology. The optimized interaction of motor and elasticity is evaluated in walking and running, using a prototype of a powered ankle prosthesis (Walk-Run ankle, Springactive). Next to experiments with a nonamputee, where the prosthesis was fitted in parallel to the fixed healthy ankle joint (Bypass), also experiments with a female unilateral transtibial amputee were performed. The optimized model behavior was compared to experimental observations and showed good agreement. Furthrmore, a concept on the improvement of an optimized walking motor pattern was successfully tested. By smoothening the motor curve to the main characteristics (low-pass filter) it was possible to increase the mechanical work output, to improve the system efficiency, and to decrease the electrical energy consumption and the noise. To further improve the prosthetic performance, the push off timing and the causes for prosthesis noise should be analyzed. Weight reductions and psychoacoustic analysis can additionally help to improve on the amputees acceptance. In addition it must be evaluated how training can effect amputees gait patterns when using powered prostheses. To further reduce the power and the energy requirements, an improvement on the powered prosthesis efficiency is recommended. The efficiency can be further increased by using higher efficiency parts and improving the interaction of the prosthesis and the amputee. The human - machine interaction depends on the prosthesis mechanics and the control algorithm. Similar to the human biarticular muscles, couplings from biological to artificial joints may provide additional benefits for the amputee. The muscles from existing proximal joints would be able to transfer energy to the distal artificial joints. Also the inverse of this principle would be possible. A coupling between the hip and the knee (transfemoral amputees) and between the knee and the ankle (transfemoral and transtibial amputees) would be possible. Due to geometrical constraints, the elemental locomotion control might improve. The results of the thesis, on the efficient cooperation of motors and springs, can be used to improve the design and the control of powered lower limb prostheses. Similar technologies can be used to improve on exoskeleton design to assist elderly and subjects with mobility impairments. Elastic exoskeletons may also augment human performance in daily life or workers environments. Next to assisting the human movement, the elastic actuators may advance the gait performance, the gait robustness, and the operation time of bipedal robots. Thus the results of the thesis Powered Lower Limb Prostheses are not limited to the specific field of prosthetics but may also be useful for applications like exoskeletons and legged robots.
For further publications of the autohr please check: ResearchGate, Google Scholar, ORCID or LOOP
Upcoming Public Talks on Powered Prosthetics and Exoskeletons


On 05. February 2015 Martin Grimmer will have his Phd disputation on the topic “Powered Lower Limb Prosthetics”. There will be a 30 minutes public talk with 1 hour discussion. It will start at 10am. The talk gives an overview on lower limb amputee walking biomechanics. Concepts for the improvement of passive prosthetic feet are introduced and evaluated using the Walk-Run Ankle that was designed by Springactive (US).
Place: TU Darmstadt, Alexanderstr. 10, Room: S1 | 15 029
At the same day at 2:15pm Prof. Thomas Sugar (Arizona State University) will have a public talk on the topic “Walking and Running with Exoskeletons”.
Prof. Sugar will talk about a wearable leg exoskeletons that assist a person to walk and run. The system seamlessly transitions between both gaits. Compliant actuators are used to assist hip flexion and extension and ankle plantar-flexion. The controller is based on a phase angle that is in tune with the motion of the person. The phase angle is calculated from thigh angular velocity and position. It was demonstrated that metabolic cost could be reduced comparing device worn to not wearing any device at all.
Place: TU Darmstadt, Magdalenenstr. 27, Room: S1 | 18 202
For further publications of the autohr please check: ResearchGate, Google Scholar, ORCID or LOOP
LabDemo at Locomotion Lab
Within different teaching courses like quantitative research methods or biomechanics the students learn how movements are described by simplified models. Here for periodic hopping the spring-mass-model is a good approximation of the reality.

But how does the human body react to perturbations of the ground level? Is the spring-mass-model still a good match to describe the response of the biological system, which involves bones, muscles, tendons, and the sensory system? Such a motion model can be evaluated and modified on the basis of experimental data.

At the LabDemo - 20th of November 2014 - the students get an insight in recent research activities and the used experimental design to approach such a research question. This includes measurement devices to record kinematics, kinetics and eltromyography. The interactive live-demo takes place at the locomotion lab. Here, highly elastic jumping boots are used to investigate the adaptation mechanisms to a perturbation in ground level. A motion capturing system captures kinematic data and kinetic data is measured with a force plate. The students get to know the practical application of different measuring systems within a research process.
10 years of Lauflabor: group retreat in Zwingenberg

On Friday noon - 22nd of August - some members and students from our lab head towards Zwingenberg (Bergstraße) to 'celebrate' the 10th anniversary of our Lauflabor. The weather was nice, so most of us came by bike (using the opportunity to 'warm-up' climbing the hill where our hostel for the night was located) before our program started.
After the group got together we had coffee and biscuits to strenghtened ourselves to be prepared for the rest of the day. Of course we talked a lot about the latest research news and impresissions from holidays.

Our first planned activity was a hiking tour to the Melibocus - a mountain 517m high. It's not just that we had a beautiful hiking tour with great viewpoints, moreover Tobias gave us an introduction to Geocaching, as there have been several caches on our route. We also found two caches and left a short note advertising our lab. By the way: Thank you Tobias for this great contribution!
Back again at the youthhostel everybody was hungry, so we started preparing dinner. Which meant for one half of the group to go shopping. The others were responsible for preparing the table and the grill. For dinner we had a barbecue with various side dishes contributed by each of us. We spent the rest of the evening talking about anything from A-Z and listening to some beautiful songs played by Patrick on his guitar.

On the next day after breakfast, we started a guided tour through Zwingenberg (lead by Dario & Patrick). Zwingenberg is a small town near Darmstadt which history reaches the year 1012.

They promote themself as a city where you can find a “modern life … in historical walls”. It used to be a trading post and controled the trading routes going along the Bergstraße from noth to south. There are lots of interesting remains of former days to discover: old churches, former castles, trade districts .. but also beautiful half-timbered houses that were restored. Unfortunately we had not enough time to visit all interesting spots in the city.
On Saturday noon everbody went back home - but naturally not without taking a final group picture.
Walking in circles: a modelling approach
Blindfolded or disoriented people have the tendency to walk in circles rather than on a straight line even if they wanted to. Here, we use a minimalistic walking model to examine this phenomenon. The bipedal spring-loaded inverted pendulum exhibits asymptotically stable gaits with centre of mass (CoM) dynamics and ground reaction forces similar to human walking in the sagittal plane. We extend this model into three dimensions, and show that stable walking patterns persist if the leg is aligned with respect to the body (here: CoM velocity) instead of a world reference frame. Further, we demonstrate that asymmetric leg configurations,
which are common in humans, will typically lead to walking in circles. The diameter of these circles depends strongly on parameter configuration, but is in line with empirical data from human walkers. Simulation results suggest that walking radius and especially direction of rotation are highly dependent on leg configuration and walking velocity, which explains inconsistent veering behaviour in repeated trials in human data. Finally, we discuss the relation between findings in the model and implications for human walking.
 |  |
Energetic and Peak Power Advantages of Series Elastic Actuators in an Actuated Prosthetic Leg for Walking and Running
 A monoarticular series elastic actuator (SEA) reduces energetic and peak
power requirements compared to a direct drive (DD) in active prosthetic ankle-foot design.
Simulation studies have shown that similar advantages are possible for the knee joint. The
aims of this paper were to investigate the advantages of a monoarticular SEA-driven hip
joint and to quantify the energetic benefit of an SEA-driven leg (with monoarticular hip,
knee and ankle SEAs), assuming that damping (negative power) is passively achieved. The
hip SEA provided minor energetic advantages in walking (up to 29%) compared to the knee
and the ankle SEA. Reductions in required peak power were observed only for speeds close
to preferred walking speed (18% to 27%). No energetic advantages were found in running,
where a DD achieved the best performance when optimizing for energy. Using an SEA at
each leg joint in the sagittal plane reduced the positive work by 14% to 39% for walking and
by 37% to 75% for running. When using an SEA instead of a DD, the contribution of the
three leg joints to doing positive work changed: the knee contributed less and the hip more
positive work. For monoarticular SEAs, the ankle joint motor did most of the positive work.
A monoarticular series elastic actuator (SEA) reduces energetic and peak
power requirements compared to a direct drive (DD) in active prosthetic ankle-foot design.
Simulation studies have shown that similar advantages are possible for the knee joint. The
aims of this paper were to investigate the advantages of a monoarticular SEA-driven hip
joint and to quantify the energetic benefit of an SEA-driven leg (with monoarticular hip,
knee and ankle SEAs), assuming that damping (negative power) is passively achieved. The
hip SEA provided minor energetic advantages in walking (up to 29%) compared to the knee
and the ankle SEA. Reductions in required peak power were observed only for speeds close
to preferred walking speed (18% to 27%). No energetic advantages were found in running,
where a DD achieved the best performance when optimizing for energy. Using an SEA at
each leg joint in the sagittal plane reduced the positive work by 14% to 39% for walking and
by 37% to 75% for running. When using an SEA instead of a DD, the contribution of the
three leg joints to doing positive work changed: the knee contributed less and the hip more
positive work. For monoarticular SEAs, the ankle joint motor did most of the positive work.
Read more at MDPI.
Read previous news...
Compliant ankle function results in landing-take off asymmetry in legged locomotion
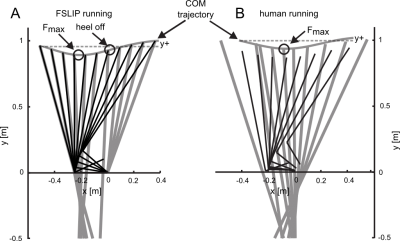
The spring loaded inverted pendulum (SLIP) model is widely used to explain basic characteristics of human walking and running. Its periodic running solutions can be mirrored at the instant of the vertical orientation of the leg and thus are symmetric between landing and take-off. In contrast, human running shows asymmetries between touchdown and take-off (e.g. shorter brake than push duration, greater mean ground reaction force during braking phase). Yet it is not fully understood whether these asymmetries are caused by asymmetric muscle properties (e.g. velocity-dependent force generation) or the asymmetric lever arm system in the human leg. We extend the SLIP model by a foot segment and a compliant ankle joint (called FSLIP). This represents the extended foot contact and the displacement of the center of pressure during contact.
The FSLIP model shows the same asymmetries as found in human running without considering asymmetric muscle properties. Together with the reversed asymmetry observed in human backward running, this indicates that the asymmetric lever arms created by the foot can cause the observed landing-take-off asymmetry in human running.
New measurement Device
 As often in Lauflabor, our hardware supplier Tetra (Tetra Ilmenau GmbH) has delivered a new piece of hardware. This time, it's a pertubation platform that can disturb human runners before, during and even after contact!
As often in Lauflabor, our hardware supplier Tetra (Tetra Ilmenau GmbH) has delivered a new piece of hardware. This time, it's a pertubation platform that can disturb human runners before, during and even after contact!
The core of this device is a force plate which is mounted on a vertical slider. The forceplate can move under load up to 1 m/s, with accelerations up to 4g. This allows to change the leg length and configuration under load, thus enabling new insights in the mechanisms that are responsible for creating the observed leg function.
Especially, it now becomes possible to investigate the long-standing hypothesis of an elastic leg: Elasticity implies a specific change of force as a function of length change. We can now directly investigate this in an experimental setup, and confirm or decline the widespread assumption of a dominant elasticity in the human leg behavior.
The BALANCE project has arrived

The EU founded BALANCE project aims at creating an exoskeleton that providesbalance support for humans. BALANCE, or more precisely B.A.L.A.N.C.E. is an acronym for Balance Augmentation in Locomotion, through Anticipative, Natural and Cooperative control of Exoskeletons.
There are four main fields of research in this project: Experiments with healthy subjects, biomechanical modelling, control design and hardware design of an improved exoskeleton.
At the Lauflabor, we will focus on biomechanical modelling in order to (a) understand how humans achieve and maintain balance in experiments, and (b) provide these models as basis for a control design to our project partners.
The BALANCE website is http://balance-fp7.eu
Our project partners are:
- Tecnalia Research & Innovation (Spain)
- Imperial College (UK)
- CEA-LIST (France)
- University of Twente (The Netherlands)
- ETH Zurich (Switzerland)
- Xsens (The Netherlands)
New technique for CoM calculation
In biomechanics, the motion of the centre of mass (CoM) is often topic of research and the accuracy of its estimation is crucial to the results. Typically, there are two ways to calculate the trajectory, namely integration of the ground reaction forces or using kinematic estimates from motion capturing. Both methods have their individual shortcomings.

Moritz Maus, André Seyfarth and Sten Grimmer have proposed a new method to combine data, that leads to physically consistent results, i.e. the outcome of the method are forces and a CoM motion, and the 2nd derivative of the motion times the mass is exactly the force. It combines those parts of the kinematic and dynamic measurements that are considered to be the most reliable. The algorithm is using different parts of the Fourier spectrum to overcome the inaccuracies of each measurement system.
In experiments and simulations, the authors show that the calculated motion and force very closely resemble the measured data. This closeness, together with the physical consistency, renders these data very reliable CoM estimates that can be used for further investigations with greater confidence.
- Literature
- Maus, H.-M., Seyfarth, A., and Grimmer, S. (2011). Combining forces and kinematics for calculating consistent centre of mass trajectories. J Exp Biol 214, 3511–3517. DOI:10.1242/jeb.057422
Stable Walking with Asymmetric Legs
Asymmetric leg function is often an undesired side-effect in artificial legged systems and may reflect functional deficits or variations in the mechanical construction. It can also be found in legged locomotion in humans and animals such as after an accident or in specific gait patterns. So far, it was not clear to what extent differences in the leg function of contralateral limbs can be tolerated during walking or running. Using a bipedal spring-mass model, Andreas Merker investigated the effect of asymmetries between contralateral legs on the dynamics and stability of spring-mass walking.
 with increasing asymmetry of angle of attack (εα)")
One important result of this study is that the asymmetric leg function does not necessarily reduce the region of stable walking. The asymmetry of leg angle can not only be tolerated during walking but it may also result in advantages, as demonstrated by the increased range of stable solution (figure). For a small range of values of leg angle, the asymmetry can even stabilize symmetric walking gaits.
- Literature
- Merker A, Rummel J, Seyfarth A. Stable Walking with Asymmetric Legs, Bioinspiration & Biomimetics, 6(4): 045004, 2011. DOI: 10.1088/1748-3182/6/4/045004
International Symposium On Adaptive Motion Of Animals And Machines

Understanding adaptive motion in humans and animals can help us to improve the adaptive behavior of machines. On the other hand, experiments with technical devices that adapt to a changing environment can shed more light on the basic principles of biological systems. We believe that such a bidirectional approach is essential to incorporate biological “intelligence” in machines. The AMAM 2013 encourages researchers from different fields to interact and exchange ideas in this interdisciplinary field. For a list of the preceding symposia, please visit the platform of AMAM conferences.
Quiet human stance is a dynamic multi-segment phenomenon
 PSI value on a grey scale from white (PSI=0) to black (PSI=1) at each frequency (abscissa) for each of the 10 subjects (ordinate). The lower subplot gives the number of subjects showing non-random (significant) phase synchronisation. If nine out of ten subjects show significant PSI values, i.e. the frequency bin bar overtops the thin dashed line (8.5) phase synchronisation is a general phenomenon at this frequency in quiet human stance on a level of 95% probability.")
For many years, the postural research community analysed and discussed quiet human stance under the simplification of a single inverted pendulum model. While recent publications point more towards a multi-segment phenomenon distinguishing hip and ankle coupling, not much effort is spent in analysing knee contributions. From an anatomical point of view this is surprising, since biarticular muscles are spanning the knee joint and thus, mechanical coupling is evident for all joints of the leg.
Lab members Michael Günther and Sten Grimmer analysed kinematics and torques of quiet human stance for phase coupling of different joints. Hereto, in a close collaboration with computational neuro-scientists Lutz Leistritz and Peter Putsche, they used the phase synchronisation index (PSI) to separate couplings as a function of frequency.
One main result is that they did not find any synchronisation between ankle and hip across the whole frequency range examined up to 8 Hz. In contrast, there was significant synchronisation found between ankle and knee at a couple of frequencies between 1.25 Hz and 8 Hz when looking at the kinematics. The joint torques rather synchronise below 2 Hz.
The results clearly show that the knee is indispensable and biarticular muscles play a central role in organising quiet human stance.
- Literature
- Günther M, Putsche P, Leistritz, L and Grimmer S. Phase synchronisation of the three leg joints in quiet human stance. Gait and Posture (2011) vol. 33 (3) pp. 412-7. DOI:10.1016/j.gaitpost.2010.12.014
Studienstiftung workshop in Cologne
In the week from March 28th - April 1st, the last phase of a workshop for students from the german Studienstiftung des deutschen Volkes took place in Cologne. Here, students from different fields worked together on building walking robots of different kind: minimalistic actuated hexapods and quadrupeds (i.e. only a single motor) as well as a replication of the Runbot. All systems were set up with Lego Mindstorms, so that changes in the robot hardware could easily be done. Despite simple mechanical design of the robots, the robots showed a surprisingly well defined (i.e. repeatable) motion. Especially the Lego-version of Runbot could walk a large number of steps in a very dynamic manner. This workshop has once more demonstrated the fascination of creating walking machines based on simple biologically inspired design concepts.
Supervisors: André Seyfarth, Moritz Maus, Prof. Dr.-Ing. Johann Reger (TU Ilmenau)
Robustness or Efficiency
For designers of bipedal robots is the selection of leg parameters a major challenge. While the robot's target is clear (walking in a stable, robust, and efficient manner), it's difficult to find proper settings. Based on a theoretical study on walking with compliant legs Jürgen Rummel has shown that robustness is best at medium leg stiffness (10 < k < 20). This finding is important for robots with passive compliant legs where the inherent system dynamics have to be exploited.
Not surprisingly, the cost of transport decreases with increasing leg stiffness, and in the case of constant stiffness, the walker is more efficient at flatter angles of attack. Efficiency plays a substantial role for humans when walking on even ground because their leg stiffness is observed to be larger than 30. When the ground becomes slightly uneven, it can be assumed that their leg stiffness and angle of attack decrease in order to gain robustness.
- Literature
-
Rummel J, Blum Y, Seyfarth A. Robust and effcient walking with spring-like legs, Bioinspiration & Biomimetics, 5(4): 046004, 2010. DOI: 10.1088/1748-3182/5/4/046004
Rummel J, Blum Y, Maus HM, Rode C, Seyfarth A. Stable and robust walking with compliant legs, IEEE International Conference on Robotics and Automation, May 3-8, Anchorage, Alaska: 5250-5255, 2010. DOI: 10.1109/ROBOT.2010.5509500
Stable Running in Three Dimensions
Previously, it was shown that the spring-mass model of running in 2D comprises a self-stabilizing effect: The model is able to recover completely from perturbations. Frank Peuker shows that this self-stabilizing effect can also be observed in 3D if the leg is aligned appropriately during swing phase. Hereby, the common angle of attack is defined not in a world referential but in a body-oriented frame expressed by the velocity vector of the runners center of mass. This approach yields self-stable and symmetric running patterns. Further features include running at arbitrary low velocities, gait transitions from hopping to running and the emergence of large stability zones with splayed legs. These results suggest, that human-like locomotion could have evolved from splayed gaits which are less efficient but more robust.
- Literature
- Peuker F, Seyfarth A. Adjusting Legs for Stable Running in Three Dimensions, IFMBE Proceedings, Lim CT, Goh JCH (Eds.), Springer, 31(1): 3-6, 2010. DOI: 10.1007/978-3-642-14515-5_1
Concept for upright human gait
In human walking, the ground reaction forces are directed above the center of mass. This observation inspired Moritz Maus to establish a general concept for trunk stabilization. An hip actuator rotates the ground reaction force such that it intersects the body axis at one point above the center of mass. This concept translates the previously unstable inverted pendulum to a virtual pendulum, including its stabilizing feature. Experiments on chickens and dogs show a similar behaviour, hence, the erect posture in human ancestors did not provide a major mechanical challenge.
- Literature
-
Maus HM, Lipfert SW, Gross M, Rummel J, Seyfarth A. Upright human gait did not provide a major mechanical challenge for our ancestors, Nature Communications, 1, 70. DOI:10.1038/ncomms1073
Maus HM, Rummel J, Seyfarth A. Stable Upright Walking and Running using a simple Pendulum based Control Scheme, Advances in Mobile Robotics, Proceedings of 11th CLAWAR, Marques L, Almeida A, Tokhi MO, Virk GS (Eds.), World Scientific: 623-629, 2008. DOI:10.1142/9789812835772_0075
First robot demo of the Locomorph Group
In July 2010 the first robot demonstration, as part of the EU project Locomorph, was arranged in Jena. The demonstration was basically a test for the robot concepts. The robot evaluation was based on gait analyses, measurements of the cost of transport, and the walking performance on different surfaces and inclined planes. A novelty was that the setup for the gait analysis, which is normally used in the biomechanics lab, was applied for the small robots. Herefore, the motion was captured with a Qualisys high-speed camera system, and simultaneuosly the dynamics were measured with Kistler force platforms. Within the Locomorph project, the results of the robot evaluation are now part of a great discussion in order to find a concept for a new robot generation.
As a sattelite meeting the workshop Motion & Morphology took place, where latest developments on locomotion and morphological aspect were presented.
The workshop was a nice panel to collect new insights around gaits and adaptability in animals and humans. Invited speakers were Reinhard Blickhan, Koh Hosoda, Tony J. Presscott, Emanuel Andrada, Oskar von Stryk and Manfred Hild.
Press release: Internationales Forschungsprojekt präsentierte Laufroboter an der Universität Jena
How come a moving biped does not fall?
Variability is an inherent property of human locomotion. The ability of a moving biped to cope with variance in kinematic states resulting e.g. from mechanical imprecision relaxes design and control. This stochastic change in system parameters and states was not yet integrated into simple dynamic or kinematic models, thus the models exhibits periodic motion and traditional, mathematical stability measures could be utilised. Though there is a need for stability measures in human and robotic bipedal motion it is possible that these stability measures can not be applied due to variance masking periodic motion. Considering the required precision of mathematical models and the levels of mechanical, control and measurement variability it seems quite hard to find “stable” motion in robots or humans.
- Literature
- Renjewski D, Seyfarth A. How come a moving biped does not fall? US National Congress of Theoretical and Applied Mechanics (USNCTAM), June 27 - July 02, State College, Pennsylvalia, Paper number: USNCTAM2010-947, 2010.
Kinematic and dynamic similarities between walking and running
The extensive debate on whether or not amputee runner Oscar Pistorius would have a considerable advantage over able-bodied runners at the 2008 Olympic Games of Beijing put forth the concern that human technology has started to get the better of nature. However, prosthetic walking devices and robotic systems to date give no reason for a generalization of this concern.
There is a lack of generally accepted basic understanding of human gait mechanics. Susanne Lipfert recently published her PhD thesis, which contains an extensive database of kinematics and dynamics in human gait for a wide range of speeds. The capability to perform two different gaits with the same two legs is investigated based on similarities between walking and running.
Forewords by André Seyfarth and Ton van den Bogert.
- Literature
- Susanne Lipfert. Kinematic and dynamic similarities between walking and running. Verlag Dr. Kovac, Hamburg, 2010. ISBN: 978-3830050308
VLO: A starting point for investigating gaits
The standard instants of gaits used as starting points for analyzing locomotion, i.e. touch down and apex, are differently defined dependent on the gait. To investigate walking and running in a single study, Jürgen Rummel introduced the instant of Vertical Leg Orientation (VLO) as starting point, which is equally defined for all gaits. Gaits with double support, i.e. walking and grounded running, can be distinguished by the center of mass height at VLO being above or below the touch down height, respectively. The VLO as Poincarè section is feasible within models of higher complexity, e.g. quadrupeds.
- Literature
-
Rummel J, Blum Y, Seyfarth A. From Walking to Running, Autonome Mobile Systeme 2009, Springer: 89-96, 2009. DOI:10.1007/978-3-642-10284-4_12
Rummel J, Blum Y, Maus HM, Rode C, Seyfarth A. Stable and Robust Walking with Compliant Legs, IEEE International Conference on Robotics and Automation, May 3-8, Anchorage, Alaska: 5250-5255, 2010.
Force-velocity relation stabilizes hopping
The figure shows a simplified hopping model. In contrast to the energy conservative spring mass model this hopping model can stabilize the hopping height by dissipating and refilling hopping energy. With this model, Daniel Häufle and others investigated the role of intrinsic muscle properties for the stabilization of periodic movements. Hereto, the force-length and force-velocity relations of the muscle were varied in three levels of approximation (constant, linear and Hill-shaped nonlinear) resulting in nine different hopping models of different complexity.
We found that stable hopping was achieved with linear and Hill-shaped nonlinear characteristic of the force-velocity relation. The characteristics of the force-length relation marginally influenced hopping stability.
- Literature
- Häufle DFB, Grimmer S, Seyfarth A. The role of intrinsic muscle properties for stable hopping-stability is achieved by the force-velocity relation, Bioinspiration & Biomimetics, 5(1): 016004 (11pp), 2010. DOI:10.1088/1748-3182/5/1/016004
Jogging as a result of optimizing walking speed
Elasticity in conventionally built walking robots is an undesired side-effect that is suppressed as much as possible because it makes control very hard and thus complex control algorithms must be used. The human motion apparatus, in contrast, shows a very high degree of flexibility with sufficient stability. André Seyfarth and others investigated how compliance and damping can deliberately be used in humanoid robots to improve walking capabilities. The modular robot system JenaWalker II consisting of rigid segments, joint modules and adjustable compliant cables spanning one or two joints is used to configure a human-like biped. In parallel, a simulation model of the robot was developed and analyzed. Walking motion is gained by oscillatory out-of-phase excitations of the hip joints. An optimization of the walking speed has been performed by improving the viscoelastic properties of the leg and identifying the appropriate hip control parameters. A good match was found between real robot experiments and numerical simulations. At higher speeds, transitions from walking to running are found in both the simulation as well as in the robot.
- Literature
- Seyfarth A, Tausch R, Stelzer M, Iida F, Karguth A, von Stryk O. Towards Bipedal Running as a Natural Result of Optimizing Walking Speed for Passively Compliant Three-Segmented Legs, International Journal of Robotics Research, 28(2): 257-265, 2009. DOI:10.1177/0278364908095843
Variable joint elasticities in running
In human running the leg as a whole behaves like a spring. The question arises how this behavior of the segmented leg is represented at joint level? Using experimental data of the leg dynamics Stephan Peter computed how the spring parameters of assumed linear torsion springs at and between the knee and ankle joints vary during gait cycle. During stance all parameters change strongly. Both knee and ankle parameter courses exhibit two phases, but only for the knee the transition is discontinuous. Such results support bio-inspired modeling and construction of locomotion systems.
- Literature
- Peter S, Grimmer S, Lipfert SW, Seyfarth A. Variable Joint Elasticities in Running, Autonome Mobile Systeme 2009, Dillmann R, Beyerer J, Stiller C, Zöllner JM, Gindele T (Eds.) Springer: 129-139, 2009.
Effective leg stiffness in running
Leg stiffness is a common parameter used to characterize leg function during bouncing gaits, e.g. running and hopping, and many different methods to estimate leg stiffness can be found in scientific literature. However, leg stiffness is derived from a conceptual model of legged locomotion and does not exist without the underlying model. Therefore, it is important to prove which method is suited best for approximating the leg stiffness in a specific task. Yvonne Blum compared different methods of stiffness estimation and, in addition to this, derived a method relying on easily accessible leg parameters only. This method seems to be a very good and simple approach for comparing human data with spring mass running.
- Literature
-
Blum Y, Lipfert SW, Seyfarth A. Effective Leg Stiffness in Running,
Journal of Biomechanics, 42(16): 2400-2405, 2009. DOI:10.1016/j.jbiomech.2009.06.040
Morin JB, Dalleau G, Kyröläinen H, Jeannin T, Belli A. A simple method for measuring stiffness during running, Journal of Applied Biomechanics, 21(2): 167-180, 2005.
Running with segmented legs
When designing a legged robot that should run, one question could arise: How does leg segmentation influence stability in running? The simplest model which answers this question is the two-segment leg with a compliant passive joint. Juergen Rummel compared this model with the already known spring-mass model and found that leg segmentation causes a nonlinear leg stiffness. Due to the nonlinear stiffness running stability is largely enhanced at a given speed. This was proven in the JenaHopper where a simple control scheme suffices for stable hopping. However, the nonlinearity of segmented legs is one reason why knee joint stiffness has to increase when running faster.
- Literature
-
Rummel J, Seyfarth A. Stable Running with Segmented Legs, International Journal of Robotics Research 27: 919-934, 2008.
Rummel J, Iida F, Smith JA, Seyfarth A. Enlarging Regions of Stable Running with Segmented Legs, Proc. IEEE International Conference on Robotics and Automation: May 19-23, Pasadena, California, 367-372, 2008.
Simulating springs and muscle-reflexes with Marco
The Marco robot was built to investigate a special type of human locomotion, namely hopping. Marco consists of a sledge representing the body, a rod fixed to the body representing a leg, and an electric motor actuating the rod, such that it can move upwards and downwards with respect to the sledge. The software can make the motor behave like a linear spring or like a Hill type muscle model. Both types of actuation result in stable hopping. Thereby, the energy lost through damping and friction is supplied during ground contact of the leg, in the spring model by changing the stiffness, in the Hill model by positive force feedback.
- Literature
-
Kalveram KT, Haeufle D, Seyfarth A. From Hopping to Walking: How the Biped Jena-Walker can learn from the Single-Leg Marco-Hopper, Advances in Mobile Robotics: Proc. of 11th CLAWAR: 638-645, 2008.
Seyfarth A, Kalveram KT, Geyer H. Simulating muscle-reflex dynamics in a simple hopping robot, Autonome Mobile Systeme 2007: 294-300, 2007.
Running on uneven ground
When humans run, they may have to deal with a vast variety of irregularities inherent to the ground. However it seems that dealing with all these irregularities is done with ease. Sten Grimmer and colleagues analyzed the leg behavior of humans running on uneven ground over a track with steps of different heights. The main result is that leg stiffness decreases with increasing step height. Furthermore, the authors show that a simple spring-mass model can explain this adjustment. They discuss the concept of self-stablity and the ability of humans to rely on this concept as well as the ability to adjust leg properties like stiffness during swing in a feed-forward manner. In a recent dispatch, Monica Daley gives a short review on these findings and states that running on uneven ground was a “no-brainer”. For engineers, these findings suggest that robotic platforms should incorporate the advantages of self-stabilizing mechanics and adapt control schemes to this concept.
- Literature
-
Grimmer S, Ernst M, Günther M, Blickhan R. Running on uneven ground: leg adjustment to vertical steps and self-stability, Journal of Experimental Biology, 211(8): 2989-3000, 2008. DOI:10.1242/jeb.014357
Daley MA. Running Over Uneven Terrain Is a No-Brainer, Current Biology, 18(22): R1064-R1066, 2008. DOI:10.1016/j.cub.2008.09.050
Diverging times in movement analysis
In movement analysis, more than one measuring system is often used to record biomechanical variables. Often times, measurements of different systems are started by a common trigger signal with no further synchronization of their sampling clocks during acquisition. With that, two systematic errors could be introduced, namely time lag and time drift. Susanne Lipfert and Michael Günther established a simple method to determine time lag and time drift for a camera system and a force measuring system. Results showed that both parameters are present and dependent on chosen sampling frequencies. Therefore, in order to avoid misinterpretation of recorded signals the identified time lag and time drift need to be taken into account for trials of all durations. Inverse dynamics or neural sciences are examples for fields, where precisely synchronizing recordings is essential.
- Literature
- Lipfert SW, Günther M, Seyfarth A. Diverging times in movement analysis, Journal of Biomechanics, 42(6): 786-788, 2009. DOI:10.1016/j.jbiomech.2008.12.020
Swing-Leg Control
Due to its simplicity and explanatory power the spring-mass model allows for identifying general leg strategies for stabilizing gait. In her recent research Yvonne Blum took advantage of this awareness and expanded the swing-leg control. She found that even without leg retraction a leg-softening mechanism during swing phase would suffice to stabilize running at moderate speeds. In contrast, a combination of leg retraction and leg stiffening largely expands the ability to compensate perturbations. This predicted behaviour corresponds to the observation of increasing extensor muscle activity before ground contact.
- Literature
-
Blum Y, Rummel J, Seyfarth A. Advanced swing leg control for stable locomotion, Autonome Mobile Systeme 2007, Berns K, Luksch T (Eds.), Springer: 301-307, 2007.
Seyfarth A, Geyer H, Herr H. Swing-Leg Retraction: A simple control model for stable running, Journal of Experimental Biology, 206: 2547-2555, 2003.
Susanne Lipfert: our Iron(wo)man
All members of the Lauflabor are very proud of Susanne Lipfert who just finished her first Ironman. The community of Penticton, BC, saw her crossing the line after an amazing 13 hours and 52 minutes out on the beautiful and challenging terrain of Subaru Ironman Canada's race course.
After a smokin' 3.8k swim in Okanagan Lake (1:05) and a fantastic 180k ride over two mountain passes in just under seven hours, she energetically kept going and ran the marathon in 5:35 (detailed results). Her first statement after the race: “I'm happy as a pig in the mud!”
- Literature
-
Blum Y, Rummel J, Seyfarth A. Advanced swing leg control for stable locomotion, Autonome Mobile Systeme 2007, Berns K, Luksch T (Eds.), Springer: 301-307, 2007.
Seyfarth A, Geyer H, Herr H. Swing-Leg Retraction: A simple control model for stable running, Journal of Experimental Biology, 206: 2547-2555, 2003.
PogoWalker at world's first robot gait analysis lab
In order to understand mechanics and stabilizing mechanisms in bipedal locomotion, Moritz Maus performs experiments with the new robot PogoWalker. He tests a, so far, theoretical control strategy for stabilizing the trunk in bipedal walking. For analyzing PogoWalkers gait the Locomotion Lab has now an instrumented treadmill for measuring ground reaction forces. This treadmill is the core of the new gait analysis lab and a worldwide novelty since it is able to measure forces for each leg seperately while the subject is lightweight.
Lauflabor locomotion lab at DFG-Science-TV
The German Research Foundation (DFG) has startet to publish cinematic diaries of selected research projects. A speciality is that the raw material was made be the scientists themself. That was Jürgen Rummel in Jena who made three movies as part of the project Lola rennt which are shown in the weeks 6, 7 and 8 at www.dfg-science-tv.de.
Bipedal spring-mass model explains walking dynamics
So far, the simplest model for walking was the inverted pendulum whereas it does not describe the double support phase and the typical ground reaction forces of human walking. With a simple bipedal spring-mass model, Hartmut Geyer showed that not stiff but compliant legs are essential to explain basic walking mechanics; incorporating the double support, reproducing the characteristic stance dynamics, and providing self-stable solutions.
- Literature
-
Geyer H, Seyfarth A, Blickhan R. Compliant leg behaviour explains basic dynamics of walking and running. Proceedings of the Royal Society of London, Series B: Biological Sciences, 273(1603): 2861-2867, 2006.
Blickhan R, Seyfarth A, Geyer H, Grimmer S, Wagner H, Günther M. Intelligence by Mechanics. Philosophical Transactions of the Royal Society of London, Series A, 365: 199-220, 2007.
Iida F, Rummel J, Seyfarth A. Bipedal walking and running with compliant legs, IEEE International Conference on Robotics and Automation (ICRA), April 10-14, Roma, Italy, 2007.
Swing-Leg Retraction applied in BioLeg I
A strategy for stabilizing running and hopping is the leg retraction of the swinging limb. Elmar Dittrich implemented this - previously theoretical - method in the BioLegI robot. He showed impressively that the BioLegI hopper can overcome large obstacles and stabilize the movement pattern by using the leg retraction strategy in a passive compliant leg. Advantages of the swing-leg retraction method are the low sensory effort and the robustness on control parameters, e.g. retraction speed.
- Literature
-
Dittrich E, Geyer H, Karguth A, Seyfarth A. Obstacle avoidance in a simple hopping robot, Climbing and Walking Robots, Brussels, Belgium, 2006.
Seyfarth A, Geyer H, Herr H. Swing-Leg Retraction: A simple control model for stable running, Journal of Experimental Biology, 206: 2547-2555, 2003.